Mars Pathfinder
A stabil verziót 2022. október 24-én nézték meg . Ellenőrizetlen változtatások vannak a sablonokban vagy a .| Mars Pathfinder | |
|---|---|
| A Mars Pathfinder és a Sojourner rover , amint kilövéshelyzetbe hajtja . ( JPL , 1996. október) | |
| Vevő | NASA , JPL |
| Operátor | Jet Propulsion Laboratory és a NASA |
| Indítóállás | Cape Canaveral LC17B |
| hordozórakéta | Delta-2 7925 D240 |
| dob | 1996. december 4. 06:58:00 UTC |
| COSPAR ID | 1996-068A |
| SCN | 24667 |
| Műszaki adatok | |
| Súly | 463 kg (Mars állomás: 264 kg, rover: 11,5 kg) |
| Áramforrás | Mars állomás: 35W, rover: 13W |
| Orbitális elemek | |
| Leszállás egy égitestre |
1997. július 4. 16:57 UTC |
| A küldetés logója | |
|
http://www.jpl.nasa.gov/missions/past/marspathfinder.html ← Cipész KÖZELÉBEN Holdkutató → | |
| Médiafájlok a Wikimedia Commons oldalon | |
A Mars Pathfinder ("Mars felfedező" a felfedező analógiájára; a forrásokban még Mars Pathfinder [1] [2] vagy Mars Pathfinder [3] ) a NASA programja a Mars tanulmányozására egy álló marsi állomás és a Sojourner rover segítségével. ( eng . Sojourner - "resident"). Az állomást később Carl Sagan Memorial Station névre keresztelték . A Sojourner lett az első rover , amely a Föld-Hold rendszeren kívül működött.
A program fő célja műszaki megoldások kidolgozása volt, mint például egy olcsó leszállási séma; további cél volt a tudományos kutatások lebonyolítása: a felszín képeinek készítése, a kőzetek összetételének vizsgálata spektrométer segítségével [4] , a légkör tanulmányozása [5] .
Repülés előrehaladása
A 895 kg össztömegű és 1,5 × 2,65 m méretű Mars Pathfindert (beleértve az üzemanyagot és a 65x48x30 cm méretű és 11,5 kg tömegű Sojourner rovert [6] ) 1996. december 4-én bocsátotta fel a NASA a NASA segítségével. egy rakéta - a Delta 2 egy hónappal a Mars Global Surveyor fellövése után . A készülék leszállása a Mars felszínén 1997. július 4-én történt az Ares-völgyben , a Chryse Planitia - síkság régiójában .
A leszálló jármű több mint 7,5 km/s sebességgel lépett be a légkörbe [7] , miközben a hőszigetelő védelem megvédte a légkörben történő lassulás során a túlmelegedéstől. Az elülső képernyő két percen belül 400 m/s-ra oltotta a sebességet. Ekkor egy 12,7 m átmérőjű ejtőernyőt nyitottak ki, melyen körülbelül 8 másodperccel a felszínre ütés előtt bekapcsoltak a fékezőmotorok és felfújták a lengéscsillapító hengereket. Az eszköz 25 m/s (90 km/h) sebességgel érte el a Mars felszínét, és többször visszapattant róla, mígnem teljesen leállt.
A NASA Long Distance Network állomásán történt meghibásodás miatt aznap nem lehetett szétválasztani a rovert. Ezenkívül kommunikációs instabilitást fedeztek fel a marsi állomás és a rover között, amit csak másnap 17:00-ra sikerült megszüntetni [5] .
Július 5-én a Sojourner rover elhagyta a marsi állomást, és július 6-án megkezdte a tudományos kísérleteket (különösen a legközelebbi kő tanulmányozását). Július 6-án körpanorámát is közvetítettek, amelyet a marsi állomás kamerája készített. A jövőben a rover még több követ tanulmányozott, az állomás szélparamétereket, hőmérsékletet és képeket is készített.
1997. szeptember 27-én történt az utolsó kommunikációs munkamenet a marsi állomással (október 7-ig adatot nem tartalmazó jelet lehetett fogni, és 1998 márciusáig próbálkoztak vele a kommunikáció kialakítása). 1998. március 10-én a Mars Pathfinder programot befejezettnek nyilvánították. A marsi állomás 3 hónapig dolgozott a bolygó felszínén, sokkal többet, mint a becsült idő (a terv szerint - egy héttől egy hónapig).
A kutatók szerint a hiba egy akkumulátor miatt következett be, amely a nagyszámú kisütési/töltési ciklus miatt hibásodott meg. Az akkumulátorral az állomás elektronikáját a Mars várható éjszakai hőmérséklete fölé melegítették. Az akkumulátor meghibásodását követően az alacsony hőmérséklet a kritikus rendszerek meghibásodásához és végül a kommunikáció megszakadásához vezetett.
Az űrhajó leírása
Mars Station
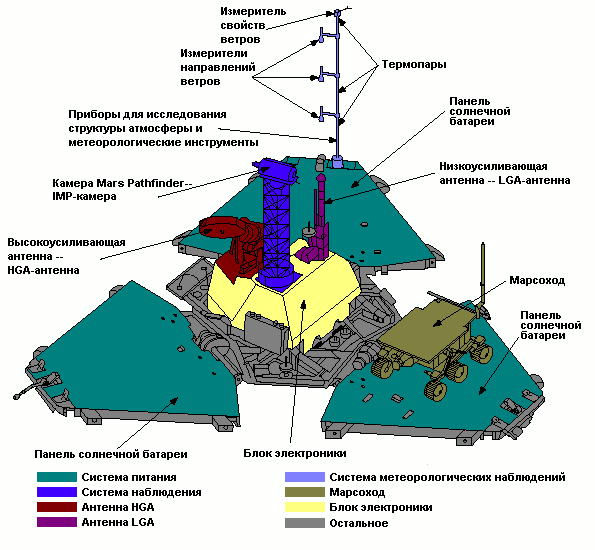
A marsi állomás (lásd az ábrát ) három, 2,8 m² összterületű napelemmel van felszerelve, amelyek 35 W teljesítményt biztosítanak egy napsütéses napon. Rajtuk kívül akkumulátorokkal is felszerelték az állomást.
{kind=link}
A marsi állomáson egy 1,8 m magasságig visszahúzható árbocon elhelyezett kamera (IMP) volt, amely két optikai bemenettel (sztereó képek készítésére) és 12 színárnyalatú szűrővel van felszerelve (kombináció után különböző szűrőkön keresztüli expozíció teszi lehetővé színes képek készítéséhez). Az állomáson az ASI/MET meteorológiai komplexumot a szél sebességét és irányát, a légköri nyomást és a hőmérsékletet mérő szenzorokkal, valamint a 0,1 mm-es méretű mágneses részecskék talajból történő kiemelésére szolgáló mágnesekkel szerelték fel.
A marsi állomást nagy és alacsony erősítésű antennákkal szerelték fel (néhány napon nem volt elegendő áram a fő nagy erősítésű antenna működtetéséhez, és az alacsony erősítésű antennán keresztül 40-150 bps sebességgel továbbították az adatokat; a fő antenna lehetővé tette a kommunikációt 8 Kbps feletti sebességnél). Az állomást egy 32 bites processzorral és 128 MB memóriával felszerelt RAD6000 -es számítógép vezérelte. A fedélzeten a VxWorks [8] operációs rendszert használták .
Sojourner rover
A rover tömege (lásd az ábrát ) az összes felszereléssel együtt körülbelül 15,5 kg, a Mars felszínén végzett munka során 10,6 kg volt; méretek - 0,65 × 0,48 × 0,3 m. A Sojourner 11 darab RE016DC DC motort használ, 3,2 W teljesítménnyel, a Maxon Motor által . Hat motor forgatja a kerekeket, egy minden kerékhez, 4 állítja be a haladási irányt, az utolsó pedig emeli és süllyeszti a spektrométert. A motorok akár -100 °C-os hőmérsékletet is kibírnak [9] .
{kind=link}
A rover hat 13 cm átmérőjű kerékkel volt felszerelve, amelyek mindegyike önállóan képes forogni. A készülék akár 45°-ban is képes megdönteni felborulás nélkül, és akár 20 cm magas akadályokat is leküzdhet.
A Sojournert egy gallium-arzenid cellákat tartalmazó napelem -rendszer táplálta . Akkumulátor területe 0,2 m², gyártó: Tecstar Inc. ". Az akkumulátor kapacitása elegendő volt a készülék napi több órás működtetéséhez, még felhős időben is. Ezenkívül a rovernek három radioizotóp eleme volt, amelyek több gramm plutónium-238-at tartalmaztak , hogy fenntartsák a kívánt hőmérsékletet az elektronikus egységben.
A rover a marsi állomáson keresztül tartotta fenn a kapcsolatot a Földdel. A rover három kamerával volt felszerelve - egy elülső sztereó rendszerrel és egy hátsó kamerával. A készülékben volt egy spektrométer is a kőzetek kémiai összetételének tanulmányozására. A Sojournert egy 8 bites , 100 kHz -en futó Intel 80C85 processzor vezérelte , a RAM mennyisége 512 kB volt, és volt egy 176 kB -os szilárdtestalapú flash memória is. Operációs rendszer nélkül működött .
Tudományos eredmények
Miután több képet kaptak az égboltról a csillag különböző pozícióiban, a tudósok meg tudták állapítani, hogy a részecskék sugara a rózsaszín köd összetételében körülbelül 1 mikrométer. A színből ítélve a talaj vas-hidroxidban gazdag, ami alátámasztja a múltban a meleg, nedves éghajlat elméletét. A Pathfinder számos mágnest hordott a fedélzetén a marsi por mágneses tartalmának mérésére. Végül egy kivételével az összes mágnest belepte a por. Mivel a leggyengébb mágnes nem gyűjtött össze talajrészecskéket, arra a következtetésre jutottak, hogy a levegőben szálló por nem tartalmaz tiszta magnetitet (mágneses vasérc) vagy oximagnetiteket . Valószínűleg a vas-oxid (Fe 2 O 3 ) okozta a porleülepedést . Később, egyszerűbb műszerekkel a Spirit rover felfedezte, hogy csak a magnetit jelenléte magyarázhatja a Marson lévő por és talaj mágneses tulajdonságait.
A Doppler-eltolás napi követése , valamint a kommunikációs munkamenetek során az űrhajó és a mélyűri kommunikációs állomások közötti távolság ritkább mérése lehetővé tette a marsi állomás helyzetének és a marsi forgástengely irányának meghatározását. A kapott adatok, figyelembe véve a viking leszállók által korábban megszerzett információkat , lehetővé tették a Mars precessziós állandójának meghatározását háromszorosára. A precesszió bizonyos foka összhangban van azzal a hipotézissel, hogy a pólus tehetetlenségi nyomatékának nem hidrosztatikus összetevője a hatalmas Tharsis vulkáni hegyvidék létezésének köszönhető . A számítások szerint a Mars fémes magjának sugara 1300-2000 km. [tíz]
A marsi állomás kamerájáról összesen 16,5 ezer, a rover kamerájáról 550 képet továbbítottak, 15 kőzetelemzést végeztek. A tudományos eredmények további alátámasztják azt a hipotézist, hogy a Mars ismét "nedvesebb és melegebb".
Sojourner vizsgálja a köveket
A rover a harmadik szolon kezdte feltárni az első sziklát . A követ Barnacle Billnek nevezték el . _ Az összetétel vizsgálatát alfa-proton-röntgen spektrométerrel (APXS) végeztük 10 órán keresztül. Minden elemet megtaláltak, kivéve a hidrogént , amely a kőzet vagy a talaj tömegének kevesebb mint 0,1%-át teszi ki. A "Barnacle Bill" összetételében hasonló volt a szárazföldi andezitekhez , ami megerősíti a Mars múltbeli nagy vulkáni tevékenységét .
A következő kutatási tárgy a kő volt, amely a „ Jógi ” nevet kapta. A kő egy medvefejre emlékeztetett, ezért a rajzfilmfiguráról, Yogi Bearről kapta a nevét. Az APXS segítségével végzett elemzés kimutatta, hogy a kő egy darab bazaltkő , elemi összetétele primitívebb, mint Barnacle Bill. A jógi felületének alakja és textúrája arra utal, hogy vízáramlatok hordozták.
Aztán a tudósokat fehéres színe vonzotta a Scubee-Doo kőhöz, és egy rovert küldtek rá, hogy ellenőrizze, hogy a követ nem fedi-e üledékes kéreg. A Sol 18-on a Scooby-Doo mérések sikeresen érkeztek, a Sol 21-en pedig a kőzetösszetételi adatok elemzése fejeződött be. Kiderült, hogy összetételében hasonló az ültetési terület talajához, de megnövekedett kalcium- és szilíciumtartalma a korábban vizsgált kövekhez képest [11] .
A következő kövön, a "Moe"-en több szélerózióra utaló nyomot találtak a felszínén .
A sziklakertnek nevezett területen Sojourner a földhöz hasonló félhold formájú dűnékkel találkozott.
Űrhajó leszállóhelyek a Marson

![]()
![]()
Jegyzetek
- ↑ Első lépések . A világ körül (2001. szeptember 1.). Letöltve: 2017. június 12. Az eredetiből archiválva : 2017. június 15.
- ↑ Mark T. Lemmon. Mars veszi körül . NASA (2001. szeptember 18.). Letöltve: 2017. június 12. Az eredetiből archiválva : 2018. március 3.
- ↑ Mars Pathfinder Space Laboratory . AstroNautica. Letöltve: 2017. június 12. Az eredetiből archiválva : 2017. június 23.
- ↑ Az Opportunity marsjáró édesvíz nyomait találja . Lenta.ru (2013. június 10.). Letöltve: 2017. június 12. Az eredetiből archiválva : 2021. április 12.
- ↑ 1 2 A "Mars Pathfinder" felfedezi a Marsot // Cosmonautics News: Journal. - 1997. - 14. sz.
- ↑ A Rover küldetésének áttekintése és célkitűzései . Letöltve: 2021. szeptember 27. Az eredetiből archiválva : 2021. szeptember 27.
- ↑ Mars Pathfinder - Entry Descent and Landing . NASA . Az eredetiből archiválva : 2012. június 1.
- ↑ CS 5523 operációs rendszerek - Mars Pathfinder (eng.) (nem elérhető hivatkozás) . UTSA Vizualizációs és Modellező Laboratórium. Letöltve: 2012. május 7. Az eredetiből archiválva : 2012. június 1.
- ↑ Mars Pathfinder // Cosmonautics News: Journal. - 1997. - 18/19.
- ↑ Golombek, M. et. al. 1997. A Mars Pathfinder küldetésének áttekintése és a leszállóhely előrejelzéseinek értékelése. Tudomány. Tudomány: 278.pp. 1743-1748
- ↑ Folytatódik a munka a Mars felszínén // Cosmonautics News: Journal. - 1997. - 15. sz.
Linkek
- NASA weboldala . Letöltve: 2012. május 7. Az eredetiből archiválva : 2012. május 18..
- Mars Pathfinder NASA/JPL webhely archiválva : 2012. május 18.
- Szuperfelbontású sztereó páros "Twin Peaks"
- Mars Pathfinder Mission Profile (nem elérhető link) . Az eredetiből archiválva : 2010. szeptember 29. aNASA Naprendszer-kutatása
- Ted Stryk Mars Pathfinder oldala (nem elérhető link) . Az eredetiből archiválva: 2007. október 5.
- "A Crawl On Mars" - Ted Stryk Sojourner rover oldala (lefelé hivatkozás) . Az eredetiből archiválva: 2007. október 5.
| | |
|---|---|
| Bibliográfiai katalógusokban |
| A Mars felfedezése űrhajóval | |
|---|---|
| Repülő | |
| Orbitális | |
| Leszállás | |
| roverek | |
| Marshalls | |
| Tervezett |
|
| Javasolt |
|
| Sikertelen | |
| Törölve |
|
| Lásd még | |
| Az aktív űrhajók félkövérrel vannak kiemelve | |
| Felfedező program _ | |
|---|---|
| Üzemeltetési | |
| Jövő | |
| Befejezve | |
| Javasolt |
|