A korlátozott csúszású differenciálmű (és: korlátozott csúszású differenciálmű (LSD), korlátozott csúszású differenciálmű , önzáró differenciálmű, korlátozott csúszási differenciálmű ) olyan differenciálmű , amelynek mechanikája az egyes forgó alkatrészek közötti szerkezetileg megnövekedett belső ellenállás miatt lehetővé teszi, hogy pl. egy differenciálmű minden - vagy külső vezérlőművelet nélkül, amely önállóan kiegyenlíti a meghajtó és a hajtott láncszemek szögsebességét egészen a teljes kölcsönös blokkolásig és a teljes differenciálmű közvetlen átvitelivé alakításáig.
Nem szabad megfeledkezni arról, hogy az angol szakirodalomban ezeket a különbségeket "LSD (Limited-Slip Differential)", azaz "limited slip differential" (slip) néven emlegetik, és ez a kifejezés nem határozza meg a működés fizikai elvét. a súrlódás, az ellenállás megléte, de a differenciálszabályozás megléte/hiánya is, stb. Csak a hajtások szögsebességeiben bekövetkező ellenőrizetlen különbségek blokkolása („csúszás”) számít. A "korlátozott csúszás" általában a szögsebesség-különbség egy bizonyos előre meghatározott határát jelenti, amely felett a zár működni kezd. Egyes megvalósításokban a blokkolás megelőző jelleggel is alkalmazható, vagyis még azelőtt, hogy a tengelytengelyek szögsebesség-különbsége keletkezne.
A korlátozott belső ellenállású differenciálmű (LDR) fő előnye a hagyományos (vagy „nyitott”) differenciálmű esetében látható, amelyben az egyik kerék egyáltalán nem érintkezik az úttal. Ebben az esetben az úttal érintkező második kerék álló helyzetben marad, és az úttal nem érintkező első kerék szabadon forog - az átvitt nyomaték mindkét keréken egyenlő lesz, de nem haladja meg a szükséges nyomaték küszöbértékét a jármű mozgásához, és ezért a jármű álló helyzetben marad. Az aszfaltozott utakon közlekedő hagyományos autókban ez a helyzet nem valószínű, ezért az ilyen autók számára a hagyományos differenciálmű meglehetősen megfelelő. Ha nehezebb körülmények között vezet, például sárban vagy terepen, ezek a helyzetek előfordulnak, és a megnövelt belső ellenállású differenciálmű lehetővé teszi, hogy ne állítsa le a mozgást. A kerekek szögsebesség-különbségének korlátozásával a hasznos nyomaték mindaddig átvitelre kerül, amíg legalább az egyik keréknek van tapadása.
A blokkoló együttható bármely RPA legfontosabb értékelési tulajdonsága. Az RPA-ról szóló tájékoztató anyagokban ez az együttható kétféleképpen fejezhető ki, és némileg eltér értelmezési jelentésében, bár mindkét esetben ugyanazt jelenti, csak más-más szempontból.
A külföldi szakirodalomban a KB-t százalékos értékként szokták kifejezni, több tíz százalékban 20% és afeletti tartományban. A szám jelzi a relatív nyomatékeloszlás tartományának szélességét az adott RPA által lefedett kerekek/tengelyek között a differenciálműbe ágyazott statikustól (a lehetséges aszimmetriájára korrigálva) a 100/0 maximális szintig, amelyen belül az RPA képes. kölcsönös blokkolást biztosítanak. Ez a meghatározás az angol Locking Effect („blokkoló hatás”) kifejezés alá tartozik. Az orosz nyelvű szakirodalomban a KB-t 2-től vagy nagyobb számmal fejezik ki (általában tizedes törtek nélkül), jelezve a maximális lehetséges különbséget a kerekek / tengelyek nyomatékaiban (a vonóerő különbsége), amelyen belül egy adott RPA képes. biztosítják a kölcsönös blokkolást. A KB ezen meghatározása megfelel az angol Torque Bias („torque shift”) kifejezésnek.
Bár a CB mindkét fogalma más-más számítási képletet tartalmaz, abszolút bármely RPA-t bármelyikkel helyesen meg lehet becsülni. Ugyanakkor a két KB érték mindegyike korrelálható az általános becsült mutatóval, és mindig van egy az egyhez megfelelőség a két érték között. Így például a KB = 50% és a KB = 3 értéke mindkét esetben ugyanazt jelenti: hogy az RPA a megadott KB-val lehetővé teszi a nyomaték újraelosztását a kerekek / tengelyek között legfeljebb 75/ 25, amely egyrészt a hatékonyan felhasznált nyomaték lehetséges újraelosztásának teljes tartományának 50 %-át adja (75-25=50), másrészt a lehetséges vonóerő 3-szoros különbségét adja (75/25). =3). A KB numerikus (nem százalékos) értéke itt talán intuitívabb, különösen azért, mert a fő jelentése mellett hasonló különbséget jelent a kerekek / tengelyek felülethez való megengedett tapadási erejében, amely ugyanebben az esetben KB = A 3 azt jelenti, hogy a motorteljesítmény maximális Hatékony felhasználása ezen az RPA-n csak akkor lehetséges, ha az egyes kerekek tapadási ereje az útfelülettel legfeljebb háromszor tér el.
Egy egyszerű (ingyenes) differenciálmű nem teszi lehetővé, hogy különbséget kapjon a hatékonyan használt nyomatékok között a hajtott linkeken, itt a két kerék / tengely vonóereje közötti különbség gyakorlatilag nulla bármilyen üzemmódban, egy ilyen differenciálmű KB-ja 0 % vagy 1. A közvetlen sebességváltó vagy a blokkolt differenciálművek lehetővé teszik az összes hatékonyan felhasznált nyomaték megvalósítását bármely hajtott tengelyen, itt bármelyik kerék/tengely a teljes tapadást nulla tapadási szinten tudja biztosítani a másik keréken/tengelyen, és a KB ebben az esetben 100% vagy a végtelenség.
Az RPA-nak két felső KB-értéke lehet, mindegyik tápághoz egy. Ez aszimmetrikus differenciál esetén lehetséges, amikor a tervezőiroda aszimmetria-korrekciót kap - vagyis a tervezőiroda felső értékei mindegyik oldalra az arány különbségével különböznek egymástól. a kioldott nyomatékok (például egy GAZ-66 teherautó aszimmetrikus hátsó bütykös keresztkerekes DPVS-ében, amely a kerekekre ható nyomatékot ≈(60/40) arányban bontja le, a KB értékei a jobb ill. a bal kerekek 3.1 és 2.1). Ez pedig szimmetrikus differenciálműben lehetséges, ha a reteszelés mechanikája szerkezetileg megengedi (például a Torsen Type-1 RPAS szimmetrikus csigahajtóműben különböző vágási szögeken keresztül különböző KB értékek valósíthatók meg minden műhold-hajtóműpárban).
Általában egy adott RPA CB-je a maximális CB. Ugyanakkor bármely RPA-nak van egy úgynevezett kezdeti KB értéke, amelyet általában nem deklarálnak.
Ez a kifejezés azt jelenti, hogy az RPA-ban belső ellenállás jön létre a hajtott láncszemek statikus, azaz a differenciálműre alkalmazott nyomaték hiányában történő kölcsönös forgásával szemben. Az előterhelési szint értékét az az erő határozza meg, amely bármely differenciálmű hajtott láncszem eltolásához (forgatásához) szükséges, amikor a hajtókar áll. Szabad differenciálműben az előterhelési szint közel nulla. Az előfeszítés, ha van, mindig „működik”, függetlenül attól, hogy az RPAS vonó- vagy féknyomatékkal van-e terhelve, vagy sem. Az előterhelés megléte nem előfeltétele az RPA működésének.
Az úgynevezett „előfeszítő tengelykapcsoló” egy bizonyos eszközt jelent az RPA-n belül, amely ellátja a fenti funkciókat, és megnehezíti a differenciálművel hajtott fogaskerekek kölcsönös forgását. Ennek az eszköznek a kialakítása nem univerzális, és bármilyen RPA-n lehet. Általában ezek különböző formájú távtartó rugók, távtartó gyűrűkkel kiegészítve.
A személygépkocsikban általában kétféle RPA-t használnak:
Mindkét típusú differenciálmű lehetővé tesz némi szerkezetileg programozott különbséget a nyomatékok (az első esetben) vagy a szögsebesség (a második esetben) között, de mechanikai korlátot szab a nagy aránytalanság előfordulásának.
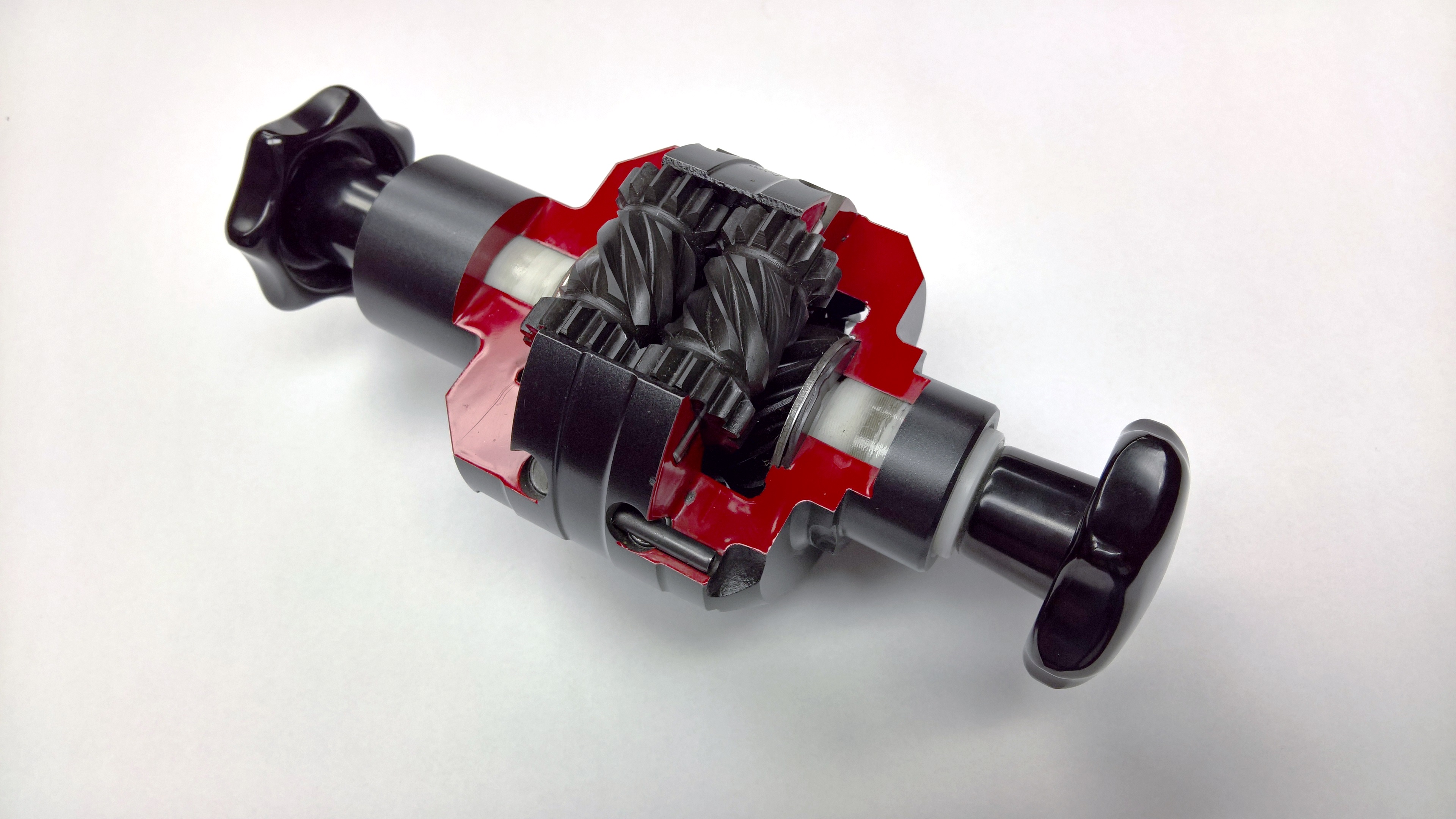
Szerkezetileg a csavaros differenciálművek az SHS vagy SVE sémák bármely lapos egysoros vagy kétsoros bolygószerkezete alapján készíthetők párhuzamos műholdak tengelyeivel, amelyek viszont lehetnek egyszeres vagy párosítva. Két jellemzője lesz minden típusú teljesítménynek: hengeres csavarkerekek használata minden kapcsolódási párban, valamint a tényleges műholdas tengelyek hiánya alkatrészként. A csavarkerekes fogaskerekes fogaskerekes fogaskerekes fogaskerekes fogaskerekes fogaskerekes fogaskerekes fogaskerekes fogaskerekes fogaskerekes fogaskerekes fogaskerekes fogaskerekes fogaskerekes fogaskerekes fogaskerekes fogaskerekes fogaskerekes fogaskerekes fogaskerekes fogaskerekes fogaskerekes fogaskerekes fogaskerekei a csavarral. A szatellit fogaskerekek pedig itt nem tengelyeken forognak, hanem a differenciálműben/tartóban mart hengeres zsebekben. A blokkolás gondolata azon alapul, hogy terhelés alatti spirális fogaskerekes áttételnél axiális erők lépnek fel, amelyek hajlamosak mindkét fogaskereket a tengelyük mentén az érintkezési síkkal ellentétes irányba tolni, és itt ezt a tulajdonságot elsősorban egymásba kapcsolt műholdak párjaiban használják. , amelyek ehhez némi axiális mobilitást kapnak. Vonóerő hatására a kerék elfordításakor vagy megcsúszásakor a zsebükbe ékelt forgó műholdak a differenciálmű házának végeihez támaszkodnak, aminek következtében fékeznek és önbeállítják a hajtott fogaskerekek szögsebességeit. A műholdak beékelődése minél erősebb, annál nagyobb az általuk továbbított nyomaték, de magát a blokkolási együtthatót a kapcsolófogak dőlésszöge és a műhold/ház érintkezőpárok súrlódási tulajdonságai határozzák meg. Az önfékező hatás fokozása érdekében ezekben a differenciálművekben általában három pár műholdat használnak többet, mint amennyi egy lapos bolygószerkezethez szükséges – nevezetesen négytől hét párig. A súrlódási hatás fokozására pedig a műholdak végeinek a differenciálházzal való érintkezési pontjain olyan anyagból készült távtartó tárcsák használhatók, amelyek fokozott súrlódási ellenállást hoznak létre. Az egyes műholdak esetében a differenciálmű működése alapvetően hasonló, azzal a különbséggel, hogy itt nem csak a műholdak, hanem a differenciálmű központi fogaskerekei is részt vesznek az önfékezésben.
Tekintettel arra, hogy tetszőleges konstrukciójú és alakú lapos bolygókerekes hajtóműveken használhatók a csavarkerekes fogaskerekek, az ezekre épülő differenciálművek szinte tetszőleges áttételi arány mellett készíthetők minden mester-szolga láncszem párban. Ennek megfelelően az ilyen differenciálművek szimmetrikusak és aszimmetrikusak is lehetnek, és a sebességváltóban kerékközi és tengelyköziként is használhatók. Az előterhelést aktívan használják ezeken a differenciálműveken, és a blokkoló nyomaték itt vontatási módban jön létre, még akkor is, ha a kimeneten nincs különbség a szögsebesség között. De kizárólag csavarkerekes áttételnél a reteszelési együttható magas értékei nem állnak rendelkezésre (általában < 3), és a hatás fokozása érdekében az ilyen differenciálműveket súrlódási csomagokkal, például tárcsás differenciálművekkel egészíthetik ki.
Manapság nagyon elterjedt a csavaros differenciálmű. Fő alkalmazási területük a sport- és versenyautók. Hangolásként is használják a közúti autók átjárhatóságának enyhe javítására. Az igazi terepjárókon azonban általában nem használják őket. A leghíresebb minták a brit Quaife Engineering cégtől és az amerikai Torsen NA Inc. -től származnak. . Az első esetben a differenciálmű neve - Quaife . A második esetben ezek az úgynevezett Torsen Type-2 és Torsen Type-3 .
Szerkezetileg minden féregzáras differenciálmű az SVS - séma egyszerű térbeli bolygómechanizmusai alapján készült, a keresztező tengelyeken műholdakkal . Vizuálisan a nap-műhold kapcsolatpárok itt csigakeréknek tűnnek , amelyben a csigakerék és maga a csiga tengelyei szintén merőlegesek egymásra, és nem metszik egymást. Mind a műholdak, mind a hajtott fogaskerekek működhetnek csigaként és csigakerékként, és vannak olyan fejlesztések, amelyek lehetővé teszik a csigazárat, amely mindkét lehetőséget kínál a szerepek elosztására a fogaskerekek között. A blokkolás ötlete azon a tényen alapszik, hogy a csigakereket önfékezés jellemzi olyan esetekben, amikor az erőt a csigakerékről a csiga felé irányítják, amely minél erősebb, annál nagyobb a csigafogak dőlésszöge. forgástengelyéhez.
Bár a féregzáró differenciálmű leginkább az amerikai Torsen NA Inc. által kifejlesztett változatban ismert. , - az úgynevezett Torsen Type-1 - maga a fejlesztő cég valamiért kerüli a "féreghajtómű" kifejezést differenciálművének leírásakor. A fogaskerekes fogaskerekeket itt metsző tengelyeken spirálisnak nyilvánítják, de nem csak csavarvonalasnak, hanem bizonyos sajátos, maga Torsen által kifejlesztett és általuk szabadalmaztatott Invex ™ fogalakzattal , ami valójában az evolvens fogaskerekes áttétel magánváltozata . Az orosz nyelvű mérnöki irodalomban úgy vélik, hogy a Torsen Type-1- ben a férgek szerepét a hajtott fogaskerekek, a csigakerekek szerepét pedig a műholdak töltik be. Ennek magyarázata a hajtott fogaskerekeken és műholdakon a spirális vágás eltérő dőlésszögéből adódik. A műhold szokatlan, háromsoros formája a széleken homlokkerekes fogaskerekes fogaskerekes fogaskerekes fogaskerekes fogaskerekes fogaskerekes áttétellel a közepén kizárólag azzal magyarázható, hogy az egymást metsző tengelyek elrendezése miatt szerkezetileg lehetetlen ugyanazon fogaskereken keresztül megszervezni az egyidejű vágást. a hajtott fogaskerekes műholdak és a műholdak egymás közötti kapcsolódása, valamint a differenciálmű belső ellenállásának növelése szempontjából ez a funkció nem releváns. Itt mindkét hajtott fogaskerekes fogaskerekek egyirányú vágása és minimális tengelyirányú mobilitása van, ami a csavaros differenciálművekhez hasonlóan szükséges ahhoz, hogy mindkét sebességfokozatot a tengely mentén terhelés alatt váltsuk, csak ebben az esetben nem a ház, hanem kölcsönös önfékezésük miatt, ami jelentősen hozzájárul a belső ellenállás általános növekedéséhez. Nyomatékérzékeny differenciálmű. A blokkolási együttható a különböző változatokban 3-6. A differenciálmű vizuálisan és kinematikailag szimmetrikus, az interaxle differenciálmű esetében pedig az eredetileg elsőkerék-hajtású AWD autók módosításainál alkalmazták. Általában véve a Torsen Type-1 az egyik leghíresebb RPA modell. Széles körben használták a különböző évek WRC és Formula 1 versenyautóiban, mind keréktárcsaként, mind interaxleként. A közúti autókon pedig teljesen egyértelmű társítássá vált az Audi - Quattro - összkerékhajtási rendszereivel, bár az Audi más lehetőségeket is használt a közelmúlt fejlesztései során. A terepjárók közül ennek az RPA-nak jól ismert szállítója a Hummer H1 .
Az igazi féregzáras differenciálművek magas (10-es nagyságrendű és még magasabb) zárási arányokkal amerikai és német tervezésűek voltak terepjáró teherautók számára. Ebben az esetben az RPVS bolygómechanizmus tervezése háromszor egymásba kapcsolt műholdakat feltételezett, amelyek közül két műhold volt féreg, egy pedig egy csigakerék. A hajtott fogaskerekek is csigakerekek voltak, és összesen 8 csiga és 6 csigakerék volt kétféle méretben a differenciálműben. Az RPA-k tömeges használatára vonatkozó fő próbálkozások a háború előtti években történtek. A Szovjetunióban ezt a típusú RPA-t a háború után tesztelték, mind a Rheinmetall-Borsig AG trófeái formájában, mind pedig a németre épülő "javított" kialakítású otthoni fejlesztések formájában. Nem állnak rendelkezésre adatok egyes amerikai és német fuvarozókról, bár a féregzárral ellátott differenciálművekről úgy vélik, hogy gyakoriak voltak a különféle terepjáró és kőbányai teherautók és traktorok esetében. A Szovjetunióban az egyetlen többé-kevésbé tömeghordozó az Ural-375D . A modern használat valószínűleg nulla.
Szerkezetileg a tárcsás differenciálmű mindig az SHS séma bolygómechanizmusából áll a kúpkerekeken, kiegészítve egy pár miniatűr kúpos súrlódó tengelykapcsolóval és egy pár többlemezes súrlódó csomaggal, amelyek a differenciálmű tengelye mentén helyezkednek el a két oldalon. a hajtott fogaskerekek és a ház. A súrlódó tárcsák egy része itt a differenciálműházhoz kapcsolódik, mások pedig egy miniatűr kúp alakú tengelykapcsolóval kapcsolódnak össze, amelyek mindegyike a saját hajtott fogaskerekével (nappal) párosul. A blokkolás ötlete azon alapul, hogy terhelés hatására a tengelyirányú erők lépnek fel a kúpfogaskerekekben, amelyek hajlamosak a fogaskerekeket egymástól eltolni, és ellentétben a szabad differenciálművel, ahol ezt a hatást próbálják kiegyenlíteni, pontosan ennek köszönhető, hogy a hajtott fogaskerekek és a differenciálműház közötti súrlódási csomagok összenyomódnak, ami viszont a szögsebességek összehangolásához vezet. A kúpos tengelykapcsolók és súrlódó tömbök mellett itt gyakran alkalmaznak távtartó rugót is a hatás fokozására, a hajtott fogaskerekek közé szerelve. A hatás fokozása érdekében ezeknek a differenciálműveknek általában nem két, hanem négy műholda van a kereszt alakú hordozón.
Az ilyen különbségek fejlesztése a háború előtti időszak óta ismert volt - az amerikai LeTurno-Westinghouse és Borg Warner cégek foglalkoztak velük. A differenciálmű a 60-as években nyerte el modern megjelenését és tárcsazárát, amikor megjelentek a viszonylag megbízható súrlódó anyagok, amelyek lehetővé tették az egész rendszer kompakt és autók számára való kialakítását. Ma kereszttengelyként használják mind a sport-, mind a terepjárók hátsó hajtott tengelyein. Megbízható, de idővel korrekciót igényelhet.
Szerkezetileg két lehetőség van. Az egyik esetben egy bütykös tengelykapcsoló , amely két bütykös tárcsából és egy repedésekkel ellátott közbenső leválasztóból áll , egy szabad differenciálmű két hajtott fogaskereke között helyezkedik el. A második esetben a differenciálmű bolygókereke egyáltalán nem rendelkezik fogaskerekekkel: az elválasztó gyűrű a differenciálmű ersatz hordozójaként, a műholdak repedezők, a hajtott fogaskerekek szerepét pedig két bütykös tárcsa vagy gyűrű tölti be. a felület hullámos profiljával, amely illeszkedik a szeparátorhoz. A blokkolás gondolata mindkét esetben azon a tényen alapul, hogy a meghajtott láncszemek szögsebessége bizonyos különbségével a repedők a bütyöktárcsák vagy -gyűrűk közé ékelődnek, és szinte azonnal blokkolják a differenciálművet. A blokkolás itt csak a szögsebesség különbségén működik. Ennek a különbségnek egy bizonyos értékéig a differenciálmű szabadként működik, elérve azonnal leblokkol, és nem mindegy, hogy nyomatékkal van-e terhelve vagy sem. A szabad és a blokkolt állapotok között nincs átmeneti blokkolási mód.
A bütykös differenciálművek első ismert fejlesztése valószínűleg Ferdinand Porsche nevéhez fűződik . Az ő differenciálműve került sorozatba a KdF-Kübelwagen gépeken . Manapság az önzáró bütykös differenciálműveket főként terepjáró járművekben és katonai felszerelésekben (páncélozott szállítóeszközök stb.) használják kerekek közötti differenciálműként.
Szerkezetileg a gömbzáras differenciálművek a szimmetrikus SHS -séma egyfajta ersatz bolygókerekei . Formálisan nem tartalmaznak sem fogaskerekeket, sem műholdakat a kialakításukban, valójában azonban az alkotóelemeik funkciói és általános működési elve megegyezik bármely valódi bolygódifferenciálmű felépítésével és működési elvével, és a reteszelés mechanikája is meghatározott. a belső munkaellenállás növekedésével, mint más típusú önzáró differenciálműveknél. A műholdak szerepében itt golyókat használnak, amelyek szorosan a differenciálmű házában (hordozójában) hurkolt hornyokba vannak csomagolva, és amelyek, mint a valódi műholdak, egyidejűleg érintkeznek egymással és egy pár hajtott ersatz fogaskerékkel (két napok). Kis szögsebesség-különbséggel a golyók egymást tolva mozognak a hurkolt horonyban egyik vagy másik irányba, biztosítva a teljes szerkezet differenciált forgását. A hajtott fogaskerekek szögsebesség-különbségének (csúszás) egy bizonyos szintjének elérésekor a golyók nem tudják fenntartani azt (a különbséget), a súrlódás miatt önfékeződnek a hornyokban, és ezáltal blokkoló hatást keltenek.
Ez a kialakítás kevéssé ismert a globális autóiparban, és valószínűleg csak Oroszországra és Ukrajnára terjed ki. A leghíresebb gömbzáras differenciálművek a Krasikov automatikus differenciálmű és a Nesterov automatikus differenciálmű.
Szerkezetileg a differenciálmű egy egyszerű bolygómechanizmusból áll, abszolút bármely áramkörből és egy viszkózus tengelykapcsolóból , amely összeköti bármely két láncszemét (bármely két tápegység/eltávolító tengely). A viszkózus tengelykapcsoló a differenciálmű belsejében is elhelyezhető és két hajtott láncszemet köthet össze, vagy kívül és csatlakoztathatja a hajtó- és hajtott láncszemeket (a viszkózus tengelykapcsoló elhelyezkedése nem befolyásolja a teljes rendszer alapvető működését). A blokkolás ötlete a viszkózus tengelykapcsoló tulajdonságain alapul, hogy kiegyenlítse a két láncszem szögsebességét a dilatáns folyadék tulajdonságai miatt. A blokkolást csak a szögsebesség különbsége váltja ki. A 100%-os blokkolás rövid ideig megengedett. Az átmeneti módokat is aktívan használják.
A viszkózus RPA-k kevésbé hatékonyak, mint a fent említett mechanikus RPA-k, mivel eloszlatják az energiát. Különösen minden olyan állandó terhelés, amely felmelegíti a folyadékot a tengelykapcsolón belül, a „differenciálhatás” tartós állandó elvesztését eredményezi. [egy]
Ezt az RPA-t nem szabad összetéveszteni a viszkózus tengelykapcsoló használatával az úgynevezett összkerékhajtási rendszerekben, igény szerint .
Az ilyen típusú differenciálműveknél a gerotor szivattyú teste az egyik oldalon , az ellenkező oldalon pedig a szivattyú belsejében lévő fogaskerékhez kapcsolódó tengely forog. Ha a ház és a hajtómű forgási frekvenciáiban eltérés van, a szivattyú a szivattyú belső üregében összenyomja a munkaközeget. Ez biztosítja a nyomaték átvitelét a gép kerekére, amely erősebb tapadású. A szivattyú alapú rendszerek felső és alsó nyomáshatárral és belső csillapítással rendelkeznek a hiszterézis elkerülése érdekében . A gerotor szivattyúkkal felszerelt legújabb rendszerek számítógép által vezérelt teljesítményt biztosítanak, ami nagyobb mobilitást biztosít és kiküszöböli az oszcillációkat.
Az autók elektronikus rendszereinek fejlesztése lehetővé tette a tengelytengelyek blokkolásának szabályozását elektronikus vezérlőegységek (ECU) segítségével. Ezek a rendszerek szükségszerűen különböző érzékelőket használnak.
Az első lépés a blokkolásgátló kerék (ABS) érzékelők használata volt a csúszó kerekek szögsebesség-különbségének meghatározása, majd a fékrendszer használatának kényszerítése a túl nagy sebességgel forgó kerék egyedi lelassításához - és ezáltal ossza el újra a nyomatékot az ellenkező kerék felé a szabad differenciálműön keresztül. Az ilyen járművekben az önzáró differenciálmű funkcióját utánozzák, maga a differenciálmű klasszikusan szabad marad, ezért egy ilyen megoldás meglehetősen olcsó, nem rontja az autó paramétereit és nem igényel különösebb karbantartást. Az ilyen rendszereket összefoglalóan " csúszásgátlónak " nevezik . Valójában az ABS rendszer fejlettebb változatáról van szó, amely nem csak fékezéskor működik, hanem mozgás és gyorsítás közben is. Egy globálisabb rendszer részeként is használják az autó karosszériájának "stabilizálására" az úton csúszás esetén. Ezeket a rendszereket azonban korlátozza a fékrendszer teljesítménye, amelyek folyamatos működés mellett hajlamosak a túlmelegedésre és az ezt követő hatékonyságvesztésre. A teljes értékű terepjárókat általában nem használják.
A második szakasz az elektronikus vezérlőrendszerek bevezetése volt, minden tengelyen súrlódó tengelykapcsolóval. Az ilyen tengelykapcsolók megközelítőleg azonos szögsebességgel haladva nyitva lehetnek, vagy fordítva, a FullTime 4WD-hez hasonlóan az állandó nyomatékátvitel érdekében zártak, de amikor az elektronika meghatározza a csúszás helyzetét, illetve annak megakadályozása érdekében, a szükséges tengelykapcsolók mennyisége csökken. kiszámított erővel nagyobb nyomatékot ad át egy kevésbé mozgatható tengelyre. Használják például a Haldex-4, VTM-4 rendszerekben. Mind elektromos tengelykapcsolókkal, mind hidraulikus tengelykapcsolókkal megvalósíthatók, amelyekhez elektromos szivattyút használnak.
Az ilyen differenciálok fejlesztésének harmadik szakasza az ún. " aktív differenciálművek ", ahol a nyomaték betáplálásának blokkolása helyett a tengelytengelyek közötti tolóerő eloszlásának állandó szabályozását alkalmazzák. Számos megvalósításban, például a Honda SH-AWD-ben, a hátsó differenciálmű csak funkcionálisan, a legklasszikusabb differenciálmechanika nélkül valósult meg, és teljes mértékben a tapadás és a hátsó kerék sebességének elektronikus szabályozására támaszkodik. Ebben az esetben az erre a tengelyre átvitt teljes nyomaték felhasználásra kerül, fékezési veszteség nélkül, csak a kevésbé csúszó tengelytengely felé oszlik el. Ugyanakkor lehetővé válik az irányíthatóság növelése kanyarodáskor a megnövekedett nyomaték külső tengelyre történő átvitele miatt, és még a normálnál nagyobb szögsebesség növekedése esetén is egy további növekvő számmal rendelkező sebességváltó miatt. Ha az ilyen rendszerek által használt érzékelők bármelyike meghibásodik, a tengely vontatási hajtása leáll, vagy a funkcionalitás csökken. Ezenkívül a rendszer kikapcsolhatja magát, például túlmelegedés esetén.
{kind=link}
{kind=link}
{kind=link}